Le guide définitif de SLAM et de cartographie mobile
L'évolution du SLAM
En raison de la croissance rapide de l'informatique puissance depuis les années 1980 - sans parler de la disponibilité du code librement téléchargeable de sociétés comme Google - SLAM est désormais utilisé dans une grande variété d'applications. En fait, vous le verrez dans pratiquement toutes les applications où une machine a besoin d'une carte en 3D de son environnement pour fonctionner. Cette évolution technologique nous a aidés à comprendre comment mettre en œuvre SLAM sur différentes plateformes et dans différents environnements, améliorant ainsi les capacités des systèmes cartographie mobile .
Voici quelques applications qui s'appuient sur la technologie SLAM :
- Robotique autonome grand public (comme les drones ou les aspirateurs)
- Voitures auto-conduites
- Applications de réalité augmentée pour smartphone
- Systèmes 3D cartographie mobile
Ces produits d'usage courant utilisent une technologie de localisation et de cartographie simultanée pour une navigation précise en temps réel.


Cartographie mobile vs. numérisation laser terrestre
Comparaison des différents workflows et de la manière dont ils répondent aux exigences de votre projet
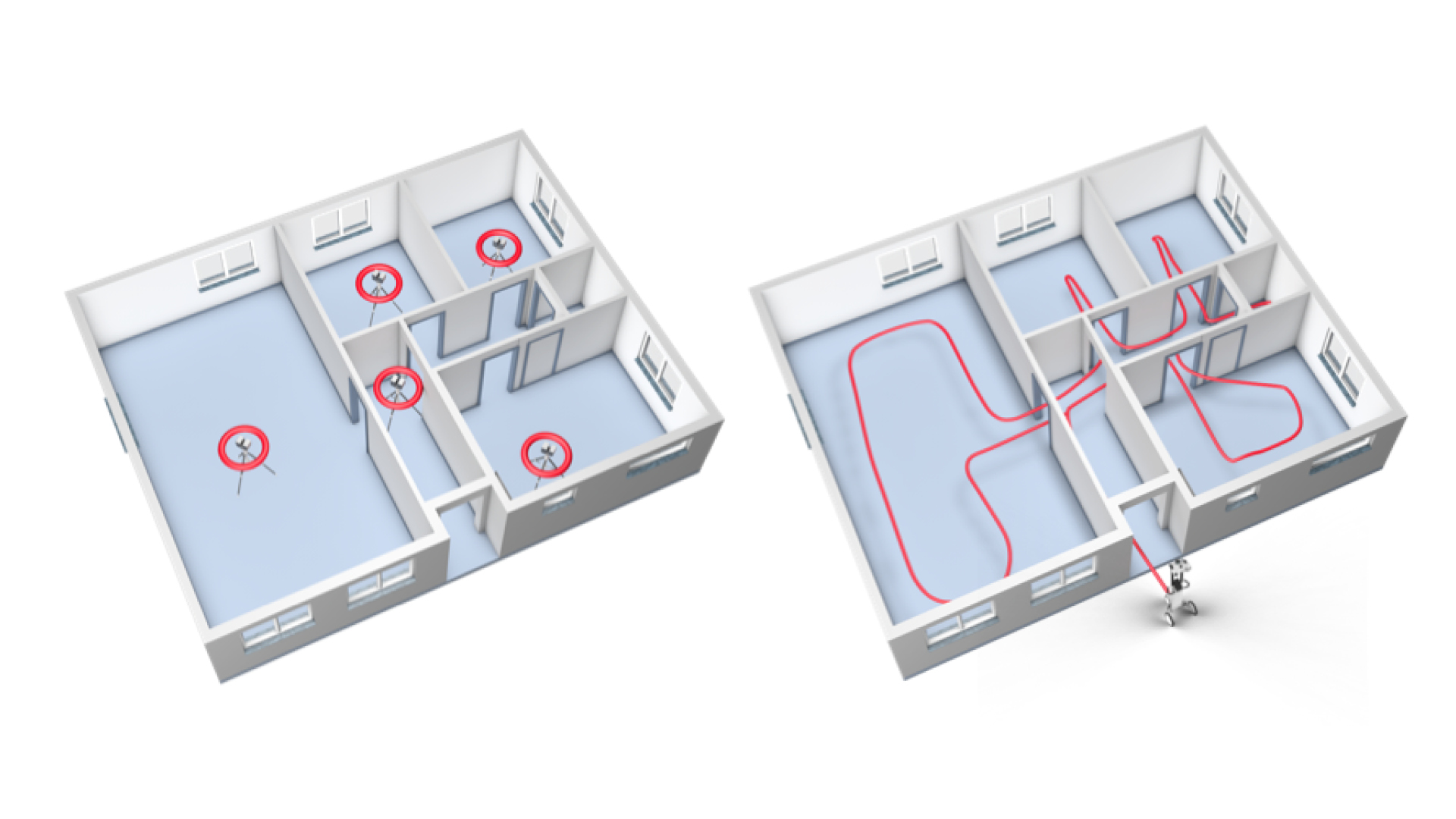
Pour illustrer les avantages des systèmes SLAM et de cartographie mobile, comparons leurs performances à celles d'un système TLS en documentant un environnement de bureau typique.
À droite, vous verrez une illustration des configurations nécessaires pour capturer cet espace complexe à l'aide de TLS et de l'enregistrement basé sur les cibles. Ajoutez des configurations supplémentaires dans chacun des cadres de porte pour l'enregistrement de cloud à cloud (à moins que vous ne souhaitiez consacrer du temps à la mise en place des cibles). Ajoutez des configurations supplémentaires si des meubles obstruent la vue de votre scanner, et encore plus de configurations si vous souhaitez capturer les détails fins d'éléments tels que les cadres de fenêtres.
Au plus vite, vous pourriez scanner cet espace en 20 minutes environ avec un TLS, mais compte tenu des facteurs supplémentaires que nous avons énumérés ci-dessus, vous pouvez voir que cela prendrait probablement plus que cela.
En utilisant un cartographie mobile workflow , vous pouvez vous passer de trépied et vous déplacer dans l'espace en fonction de vos besoins. Vous pouvez vous déplacer rapidement et être sûr d'avoir obtenu tout ce dont vous avez besoin, ce qui permet à la technologie de localisation et de cartographie simultanées de se charger de la cartographie de votre environnement.



Essayez-le vous-même
Franchissez une nouvelle étape dans la révolution de la numérisation mobile
La vitesse et l'évolutivité des appareils cartographie mobile n'ont jamais été aussi bonnes, apportant la précision de qualité topographique aux projets les plus difficiles. Mettez la main à la pâte avec NavVis VLX et voyez par vous-même ce qui est possible. Cet outil incarne le dernier cri en matière de localisation et de cartographie cartographie mobile et simultanées, offrant une précision et une efficacité inégalées, même pour les projets les plus difficiles.