

Explorons la technologie SLAM , y compris les principes de base de son rôle et de son fonctionnement, ainsi que des conseils pratiques pour garantir des résultats de qualité optimale sur le site cartographie mobile .
Les avantages des systèmes mobiles sont bien connus dans le secteur de la cartographie. Comparés aux scanners laser terrestres (TLS), ces outils offrent des flux de travail plus rapides et une meilleure couverture, ce qui se traduit par une réduction du temps passé sur le terrain et des coûts de saisie pour le prestataire de services.
Cependant, pour les professionnels expérimentés de la 3D, les systèmes cartographie mobile peuvent sembler être un moyen risqué de générer des données dont leurs entreprises dépendent. En effet, les systèmescartographie mobile reposent sur des algorithmes de localisation et de cartographie simultanées (SLAM ), qui automatisent une grande partie de la cartographie workflow. Cette automatisation peut rendre difficile la compréhension exacte de la manière dont un système cartographie mobile génère un résultat final nuage de points, ou de la manière dont un technicien de terrain doit planifier son travail workflow pour garantir la meilleure qualité possible livrable.
Pour vous aider, cet article ouvrira la boîte noire pour explorer SLAM plus en détail. Nous aborderons les bases de la technologie, la manière dont elle peut affecter la précision du résultat final nuage de points, et enfin, nous proposerons quelques conseils concrets pour garantir des résultats sur lesquels vous pouvez asseoir votre réputation.
Qu'est-ce que le SLAM ?
La localisation et la cartographie simultanées (SLAM) est un algorithme qui fusionne les données provenant des systèmes de cartographie embarqués capteurs - lidar, RGB caméra, centrale inertielle, etc. - pour déterminer votre trajectoire lorsque vous vous déplacez dans un bien.
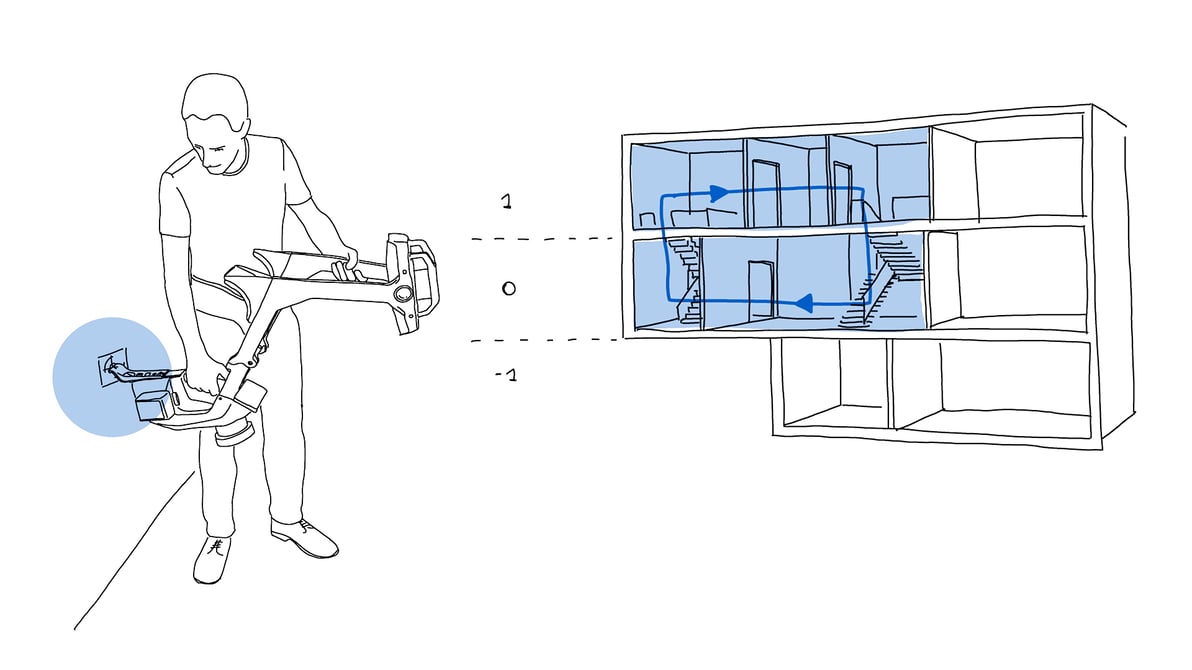
Voici une explication simplifiée de son fonctionnement : Lorsque vous initialisez le système, l'algorithme SLAM utilise les données des capteurs et la technologie de vision par ordinateur pour observer l'environnement et faire une estimation précise de votre position actuelle.
Lorsque vous vous déplacez, le site SLAM reprend cette estimation de votre position précédente, recueille de nouvelles données à partir du système embarqué capteurs, compare ces données avec les observations précédentes et recalcule votre position.
En répétant continuellement ces étapes, le système SLAM suit votre parcours au fur et à mesure que vous vous déplacez dans le bien.
SLAM est un processus complexe - même dans l'explication simplifiée ci-dessus - mais on peut l'assimiler à la méthode des traverses en arpentage. Pour une traversée, un geomètre prend des mesures en un certain nombre de points le long d'une ligne de déplacement. Lorsque le site geomètre se déplace pour mesurer chaque nouveau point, il utilise les points précédents comme base de calcul.
Un algorithme SLAM effectue ce type de calcul précis un très grand nombre de fois par seconde. En d'autres termes, un algorithme SLAM est une technologie sophistiquée qui effectue automatiquement une traversée au fur et à mesure que vous vous déplacez.
.png?width=1920&name=MicrosoftTeams-image%20(9).png)
Comment SLAM affecte la précision
Pour comprendre la précision d'un dispositif SLAM , il faut comprendre une différence essentielle dans la manière dont les systèmes de cartographie saisissent les données.
Un scanner laser terrestre (TLS) capture un environnement en faisant tourner un capteur laser à 360° et en prenant des mesures de son environnement. Comme il tire à partir d'un endroit fixe, chaque mesure dans le site nuage de points qu'il capture est déjà alignée avec précision dans l'espace par rapport au scanner.
Un systèmecartographie mobile fait également tourner un capteur laser à 360°, mais pas à partir d'un emplacement fixe. Comme vous marchez pendant que vous scannez, vous déplacez également le capteur pendant qu'il tourne. Cela entraîne des erreurs d'alignement pour chaque mesure et dégrade la précision du résultat final. nuage de points.
Vous avez déjà expérimenté un phénomène similaire si vous avez pris une photo de nuit et que vous avez déplacé le site caméra, ce qui a provoqué un effet de flou. De même, si vous regardez les données brutes d'un système cartographie mobile avant qu'elles n'aient été nettoyées par un algorithme SLAM , vous verrez que les points sont désordonnés, étalés et doublés dans l'espace.
Un système cartographie mobile est conçu pour corriger ces erreurs d'alignement et produire un nuage de points propre et précis. Pour ce faire, il utilise la trajectoire enregistrée par l'algorithme SLAM . Ces données lui permettent de déterminer l'emplacement du scanner au moment où chaque mesure a été prise et d'aligner ces points avec précision dans l'espace.
Cela signifie que la précision d'un système alimenté par SLAM cartographie mobile ne dépend pas seulement de la précision du capteur lui-même. Elle dépend également beaucoup de la qualité de l'algorithme SLAM qui suit votre trajectoire.
SLAM erreurs de précision
Pour mettre au point des algorithmes SLAM qui suivent votre trajectoire avec précision et produisent un site nuage de points de grande qualité, les fabricants ont dû relever un défi de taille : corriger deux types d'erreurs.
Le premier est appelé erreur de suivi. Les erreurs de repérage se produisent parce que les algorithmes de SLAM peuvent avoir des difficultés avec certains environnements. Un long couloir, par exemple, ne présente généralement pas les caractéristiques environnementales sur lesquelles le site SLAM s'appuie, ce qui peut amener le système à perdre la trace de votre position.

Le deuxième type d'erreur est appelé dérive. dérive se produit parce que l'algorithme SLAM utilise les données des capteurs pour calculer votre position, et tous les capteurs produisent des erreurs de mesure. En raison du mode de fonctionnement des algorithmes SLAM , qui calculent chaque position sur la base des positions précédentes, comme dans le cas d'une traversée, les erreurs de capteur s'accumulent au fur et à mesure du balayage. La précision de la trajectoire devient alors "dérive" et la qualité des résultats finaux s'en trouve dégradée.
Si vous avez numérisé avec un des premiers systèmes cartographie mobile , ces erreurs ont très probablement affecté la qualité de vos données finales.
Workflow les étapes pour garantir des résultats de haute précision
La bonne nouvelle, c'est que la technologie cartographie mobile a considérablement évolué depuis son introduction sur le marché. Les fabricants ont mis au point des algorithmes SLAM qui réduisent automatiquement les erreurs de suivi et dérive . De plus, les cartographes mobiles proposent désormais des processus fiables de correction manuelle des erreurs, ce qui vous permet de maximiser la précision de votre produit final nuage de points.
Le processus le plus répandu pour corriger les erreurs s'appelle fermeture de boucle. Pour effectuer un fermeture de boucle, il suffit de revenir à un point qui a déjà été scanné, et le SLAM reconnaîtra les points qui se chevauchent. Cela lui donne toutes les informations nécessaires pour calculer les erreurs de dérive ou de suivi qui se sont produites et apporter les corrections nécessaires. Vous pouvez considérer fermeture de boucle comme un processus qui automatise la fermeture d'une traversée.
Bien que fermeture de boucle soit efficace dans les grands espaces tels que les gymnases, les espaces extérieurs ou même les grands bureaux, certains environnements peuvent rendre fermeture de boucle difficile (par exemple, les longs couloirs explorés ci-dessus).
Dans ce cas, les systèmes les plus avancés ( cartographie mobile ) offrent une fonction permettant de verrouiller les données de numérisation en fonction des points de contrôle. Ce processus est également simple : Placez des points de contrôle, tels que des cibles en damier, sur l'ensemble du bien à capturer. Ensuite, saisissez leurs coordonnées à l'aide d'un système plus précis que le système cartographie mobile , comme une station totale.
Lorsque vous scannez le bien, saisissez les points de contrôle. Le système cartographie mobile utilisera ces informations pour mettre en place le système mobile nuage de points , réduire les erreurs et assurer la précision du système de qualité topographique , même dans les environnements les plus difficiles. Lorsque la précision est de la plus haute importance, c'est la méthode à utiliser.
L'algorithme SLAM est crucial
À ce stade, il est important de noter que chaque fabricant utilise un algorithme propriétaire SLAM dans ses systèmes. cartographie mobile systèmes. Ces algorithmes peuvent sembler similaires à première vue, mais les différences entre eux peuvent entraîner une disparité importante dans la qualité des données finales.
C'est pourquoi la mesure la plus importante que vous puissiez prendre pour garantir des résultats de haute qualité est d'étudier un système cartographie mobile au cours de votre processus d'achat, et de vous renseigner sur le site SLAM qui l'alimente.
Découvrez les méthodes utilisées par l'algorithme SLAM pour corriger les erreurs. Peut-il utiliser fermeture de boucle et des points de contrôle ? Dans quelle mesure ces méthodes fonctionnent-elles dans les environnements que vous allez capturer ? Comment le fabricant communique-t-il la précision relative et absolue que vous pouvez obtenir avec ces méthodes ?
Découvrez les performances de l'algorithme SLAM dans les situations difficiles. Quelle précision peut-il atteindre dans des couloirs longs et étroits ? Ou dans de grands espaces ouverts ? Comment gère-t-il les surfaces réfléchissantes ? Ou les objets en mouvement, tels que les personnes qui passent ? Réussit-il à niveler le balayage dans divers environnements ?
Les réponses à ces questions vous indiqueront le type de qualité de données que vous pouvez attendre de la cartographie mobile et vous aideront à trouver un outil sur lequel vous pourrez compter dans les types d'environnements que vous scannez dans le cadre de votre travail quotidien.
Recapitulatif
Un algorithme SLAM utilise les données des capteurs pour suivre automatiquement votre trajectoire lorsque vous vous déplacez avec votre mobile mapper sur un site. Le logiciel de cartographie, quant à lui, utilise ces données pour aligner correctement votre nuage de points dans l'espace.
En raison du fonctionnement des algorithmes SLAM , la technologie cartographie mobile est intrinsèquement sujette à certains types d'erreurs - y compris des erreurs de suivi et dérive- qui peuvent dégrader l'exactitude de votre résultat final nuage de points.
Malgré cela, les utilisateurs ont un contrôle important sur la qualité du produit final livrable. En investissant dans un système cartographie mobile qui réduit efficacement les erreurs pendant le processus de numérisation, puis en effectuant les étapes workflow nécessaires pour corriger les erreurs manuellement, les professionnels de la cartographie peuvent produire des résultats de haute qualité sur lesquels leurs entreprises peuvent compter.
Pour consulter nos données d'essai validées sur la précision du NavVis M6 et NavVis VLX dans une variété d'environnements difficiles, et pour découvrir à quel point les fonctionnalités fermeture de boucle et point de contrôle de notre site SLAMpeuvent améliorer la qualité des résultats finaux, téléchargez notre site livre blanc ici.
Sean Higgins est un rédacteur indépendant spécialisé dans la technologie, un ancien rédacteur en chef d’une publication spécialisée et un passionné de plein air. Il pense qu’écrire clairement et sans mot à la mode sur les technologies 3D est un service public.