

NavVis annonce un nouveau logiciel de cartographie qui améliore considérablement la précision de la technologie SLAM dans les environnements intérieurs, tels que les longs couloirs.
NavVisleader mondial de la cartographie, de la visualisation et de la navigation mobiles en intérieur, annonce un nouveau logiciel de cartographie qui améliore considérablement la précision de la technologie de localisation et de cartographie simultanées (SLAM) dans les environnements intérieurs, tels que les longs couloirs. La mise à jour du logiciel sera disponible pour les utilisateurs du NavVis M3 Trolley et améliorera considérablement la précision des cartes et des nuages de points obtenus.
NavVisLe système cartographie mobile , le chariot M3, s'appuie sur SLAM pour accroître la vitesse et l'efficacité du balayage des bâtiments. SLAM est une technique développée à l'origine par l'industrie de la robotique qui est maintenant de plus en plus utilisée dans les technologies d'arpentage et de conduite autonome. SLAM résout un problème central qui a longtemps gêné les ingénieurs en robotique en permettant à un appareil de déterminer sa position tout en cartographiant simultanément un environnement inconnu. Pour ce faire, des millions de mesures sont enchaînées afin d'obtenir une estimation de la trajectoire.
Cependant, même lorsqu'un appareil capture des mesures individuelles très précises, leur enchaînement entraîne une accumulation de bruit et de minuscules incertitudes de mesure. Avec le temps, le mouvement estimé commencera à s'écarter du mouvement réel, ce qui est connu sous le nom d'"erreurdérive ". Cet écart peut souvent être observé sous la forme d'une légère courbure des longs couloirs qui sont en réalité rectilignes. Tous les systèmes SLAM disponibles - qu'ils utilisent des LIDAR ou d'autres capteurs - sont intrinsèquement affectés par ce phénomène.
La technologie innovante de NavVis Precision SLAM réduit considérablement l'erreur dérive et améliore la précision SLAM . Ceci est particulièrement évident dans les cas où des techniques complémentaires telles que les fermetures de boucles ne peuvent être déployées si, par exemple, l'agencement du bâtiment ne le permet pas. Precision SLAM améliore même la précision lorsque des ancres SLAM sont utilisées pour incorporer des points de contrôle au sol dans le processus de cartographie.
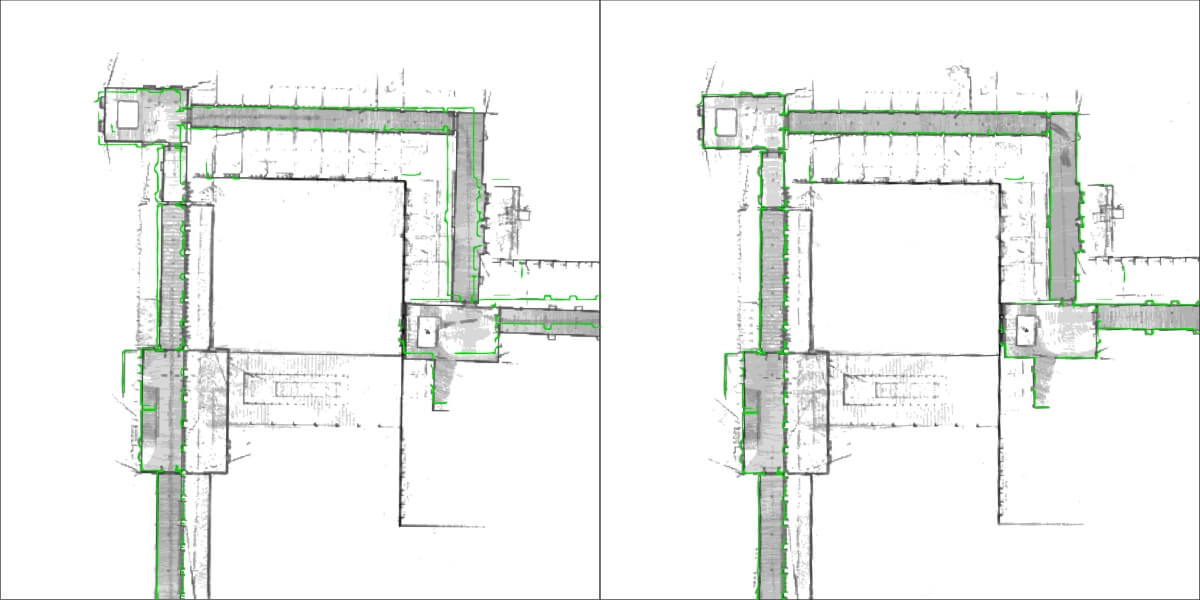
Les images ci-dessous illustrent l'impact de la technologie de NavVis Precision SLAM . L'image de gauche montre un long couloir cartographié avec un système conventionnel SLAM où l'erreur dérive mentionnée ci-dessus s'est produite. Le contour vert montre comment la carte s'écarte de la structure réelle. L'image de droite montre l'amélioration significative de la précision cartographique obtenue en cartographiant la même zone à l'aide du chariot M3 équipé de la nouvelle technologie Precision SLAM .
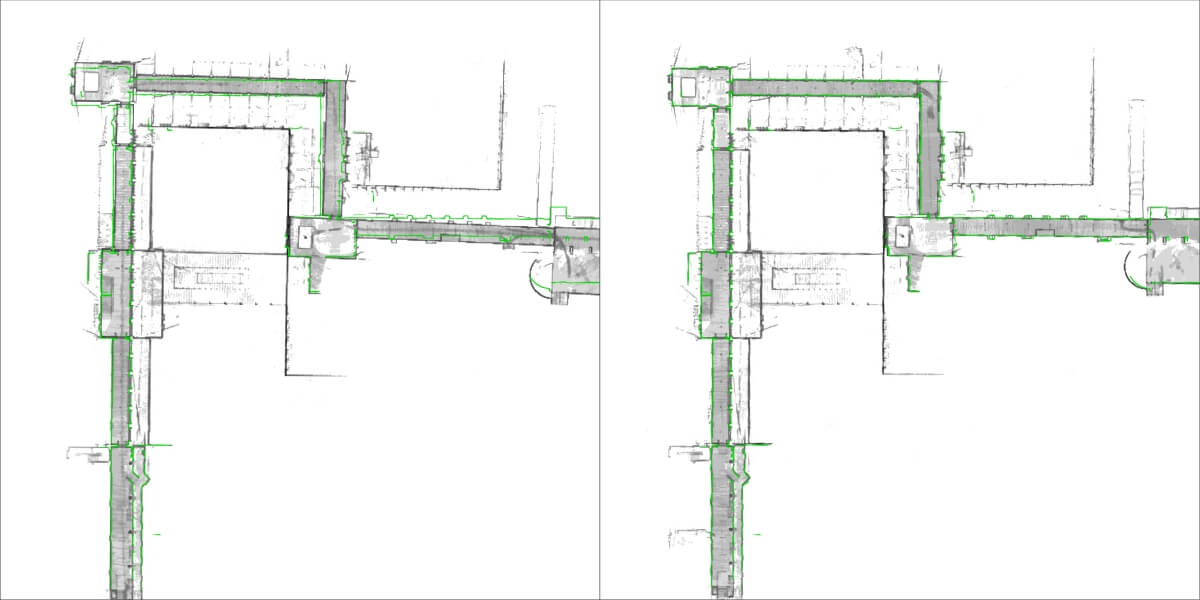
Voici un aperçu plus détaillé :
Stefan Romberg, responsable du site numérisation et perception à l'adresse suivante NavVisa déclaré :
"Je suis très enthousiaste à propos de notre nouvelle technologie Precision SLAM . Nous nous efforçons toujours d'obtenir la plus grande précision possible pour les cartes et les sites nuage de points et l'amélioration de SLAM est un élément essentiel de notre réussite. Il est bien connu des développeurs et des utilisateurs de SLAM que des approches complémentaires telles que les fermetures de boucles ou les points de contrôle au sol sont nécessaires pour obtenir une grande précision. Cependant, avec la technologie Precision SLAM , nous avons développé une approche qui non seulement complète parfaitement les techniques précédentes, mais qui est particulièrement évidente lorsque ces dernières ont peu d'effet ou ne peuvent pas être utilisées".